")
Obsah:
- Krok 1: Sledujte práci mého projektu
- Krok 2: Získejte veškerý materiál
- Krok 3: Nahrajte program na desku Arduino
- Krok 4: Položte stopy a vytvořte rozvržení
- Krok 5: Schéma obvodu je vždy užitečné
- Krok 6: Připojte výhybky k výstupu desky ovladače L298N
- Krok 7: Připojte napájecí podavač k jinému výstupu na desce ovladače L298N
- Krok 8: Připojte desku ovladače L298N k napájecím pinům desky Arduino
- Krok 9: Připojte senzor k desce Arduino
- Krok 10: Připojte vstupní piny ovladače motoru k desce Arduino
- Krok 11: Umístěte vlak na koleje
- Krok 12: Zapněte nastavení
- Krok 13: JE HOTOVO
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:19.
- Naposledy změněno 2025-01-23 14:38.

Vytváření rozvržení modelových vlaků je skvělý koníček, jeho automatizace to výrazně zlepší! Podívejme se na některé výhody jeho automatizace:
- Levný provoz: Celé rozvržení je řízeno mikrokontrolérem Arduino pomocí ovladače motoru L298N, jejich cena je ve srovnání s tradičními škrticími klapkami a napájecími soupravami téměř nulová.
- Ideální pro umístění na displej: Protože k udržení kontroly nad rozvržením není vyžadován žádný zásah člověka, můžete jej použít na displeji, kde nemůžete být vždy přítomni k ovládání vlaku a výhybek.
- Skvělé pro fandy mikrokontrolérů: Pokud jste nebo chcete začít s Arduinem a programováním, je to skvělý projekt, kde si můžete procvičit své dovednosti.
Pokud vás to zajímá, můžete si také zkontrolovat předchozí verzi tohoto projektu, která je ještě jednodušší.
Takže bez dalších okolků začněme!
Krok 1: Sledujte práci mého projektu


Krok 2: Získejte veškerý materiál

Chcete -li začít, ujistěte se, že máte všechny následující položky:
- Je preferována deska mikrokontroléru Arduino, UNO.
- Deska ovladače motoru s dvojitým H-můstkem motoru L298N.
- 6 propojovacích kabelů mezi muži a muži.
- 7 propojovacích kabelů mezi mužem a ženou.
- Šroubovák.
- Napájecí adaptér 12 V DC.
- Segment dráhy s IR senzorem přiblížení připevněným na spodní straně (použil jsem kolejnici Kato S62)
Krok 3: Nahrajte program na desku Arduino
Pokud jej nemáte v počítači, stáhněte si odtud Arduino IDE. Poté stáhněte a otevřete daný soubor.
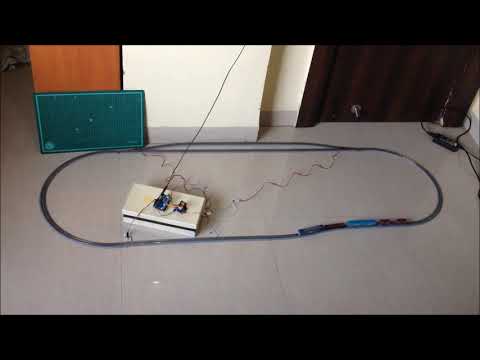
Krok 4: Položte stopy a vytvořte rozvržení

Vytvořte oválnou smyčku s procházející vlečkou tak, jak je uvedeno výše. Ujistěte se, že vzdálenost mezi senzorovou kolejí a první výhybkou, kterou vlak přejde po překročení kolejí senzoru, je větší než délka vlaku tak, aby žádná část vlaku nebyla nad kolejí senzoru, když překračuje výhybku.
Krok 5: Schéma obvodu je vždy užitečné

Kliknutím na obrázek získáte úplné zobrazení. Než budete pokračovat, ujistěte se, že jste si prošli celé schéma obvodu a všechny detaily.
Krok 6: Připojte výhybky k výstupu desky ovladače L298N




Připojte červený a černý vodič obou výhybek k sobě, což vede k paralelnímu připojení. Poté připojte červené vodiče k out4 a černé vodiče ke svorce out3 na desce ovladače motoru.
Krok 7: Připojte napájecí podavač k jinému výstupu na desce ovladače L298N


Připojte bílý vodič napájecího zdroje k výstupu out1 a modrý vodič ke svorce out2 desky ovladače motoru.
Krok 8: Připojte desku ovladače L298N k napájecím pinům desky Arduino

Připojte 12voltový pin ke kolíku VIN desky Arduino, pin GND ke kolíku GND desky Arduino a nejlépe 5voltový pin ovladače motoru k 5voltovému pinu desky Arduino.
Krok 9: Připojte senzor k desce Arduino

Připojte pin VCC senzoru k 5voltovému kolíku desky Arduino, pin GND ke kolíku GND desky Arduino a pin OUT ke kolíku A0 desky Arduino.
Krok 10: Připojte vstupní piny ovladače motoru k desce Arduino

Připojte digitální piny desky Arduino ke vstupním pinům desky ovladače motoru následujícím způsobem:
- D9 až IN1
- D10 až IN2
- D11 až IN3
- D12 až IN4
Krok 11: Umístěte vlak na koleje

Po kontrole všech elektroinstalačních spojů postavte vlak na vlečku.
Krok 12: Zapněte nastavení

Zapněte nastavení a zajistěte, aby se výhybky přepnuly na vlečku, pokud ne, stačí jen obrátit spojení výhybek vytvořených s ovladačem motoru. Také se ujistěte, že se vlak začne pohybovat dopředu. Pokud se vlak pohybuje špatným směrem, obraťte spojení přivaděče s strojvedoucím.
Krok 13: JE HOTOVO
Projekt je prozatím dokončen. Můžete si pohrát s kódem Arduino, abyste změnili funkčnost rozvržení, přidali další vlečky, vše je přizpůsobitelné! Rád bych věděl o jakýchkoli úpravách, které v tomto projektu provedete, dejte mi vědět v níže uvedených komentářích. Vše nejlepší!
Doporučuje:
Automatizované rozvržení modelové železnice se dvěma vlaky (V2.0) - Na základě Arduina: 15 kroků (s obrázky)
 - Na základě Arduina: 15 kroků (s obrázky)")
Automatizované rozvržení modelové železnice se dvěma vlaky (V2.0) | Arduino Based: Automatizace rozvržení modelové železnice pomocí mikrokontrolérů Arduino je skvělý způsob, jak spojit mikrokontroléry, programování a modelové železnice do jednoho koníčku. Existuje řada projektů, které umožňují autonomní provoz vlaku na modelové železnici
Automatické rozložení modelové železnice s reverzními smyčkami: 14 kroků

Automatické rozvržení modelové železnice s reverzními smyčkami: V jednom z mých předchozích Instructables jsem ukázal, jak vytvořit jednoduchou automatizovanou modelovou železnici z bodu do bodu. Jednou z hlavních nevýhod tohoto projektu bylo, že se vlak musel pohybovat v opačném směru, aby se vrátil zpět do výchozího bodu. R
Ovladač Arduino pro automatizovanou 360 ° fotografii produktů: 5 kroků (s obrázky)
")
Ovladač Arduino pro automatizovanou 360 ° fotografii produktů: Postavíme ovladač na bázi arduina, který ovládá krokový motor a spoušť fotoaparátu. Spolu s gramofonem poháněným steppermotorem jde o výkonný a levný systém pro automatizovanou 360 ° fotografii produktů nebo fotogrammetrii. Automatický
Rozložení modelové železnice s automatickým projížděním vlečky (V2.0): 13 kroků (s obrázky)
: 13 kroků (s obrázky)")
Rozložení modelové železnice s automatickým projížděním vlečky (V2.0): Tento projekt je aktualizací jednoho z předchozích projektů modelové železniční automatizace, Rozložení modelové železnice s automatickým vlečením. Tato verze přidává funkci spojování a rozpojování lokomotivy s kolejovými vozidly. Provoz
Automatizovaná modelová železnice z bodu do bodu s vlečkou: 10 kroků (s obrázky)
")
Automatizovaná modelová železnice Point to Point s Yard Siding: Mikrokontroléry Arduino otevírají velké možnosti v modelové železnici, zvláště pokud jde o automatizaci. Tento projekt je příkladem takové aplikace. Jedná se o pokračování jednoho z předchozích projektů. Tento projekt se skládá z jednoho