")
Obsah:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:24.
- Naposledy změněno 2025-01-23 14:38.

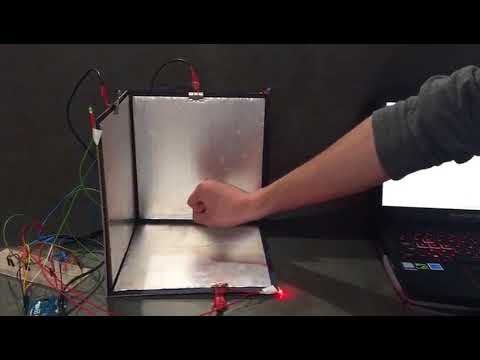

V této instrukci je vysvětleno, jak lze pohyb ruky sledovat ve 3D prostoru pomocí principu kapacitního snímání. Změnou vzdálenosti mezi nabitou hliníkovou fólií a rukou se bude kapacita kondenzátoru lišit. Tuto metodu lze použít jako alternativu low-endu pro setrvačné a optické systémy pro sledování pohybu ve 3D prostoru. Do tohoto prototypu jsme přidali LED diody, které budou svítit, když se předmět pohybuje příliš blízko listu hliníkové fólie.
Krok 1: Požadované nástroje a materiály
- 3x odpor 270k Ohm
- 3x 10k Ohm odpor
- 3x klip Alligator
- 1x červená LED
- 1x modrá LED
- 1x zelená LED
- 3x odpor 220 ohmů
- Pájka
- Smršťování teplem
- Stíněný kabel
- Arduino Uno
- Hliníková fólie
- Lepenka
- Páska
- Nastříkejte lepidlo
- prkénko
- Připojovací vodiče (různé délky)
Krok 2: Konstrukce rámu




Vystřihněte tři čtvercové kusy lepenky (250x250 mm) a tři čtvercové kusy hliníkové fólie (230x230 mm). Na jednu stranu hliníkové fólie naneste lepidlo ve spreji a každou naneste na kousky lepenky. V tomto prototypu budou fólie z hliníkové fólie fungovat jako naše kapacitní senzory. Proto se ujistěte, že mezi hliníkovou fólií a okrajem lepenky je dostatek místa, aby po sestavení rámu nedošlo ke kontaktu mezi různými listy fólie. Jakmile je fólie nanesena na lepenku, je čas sestavit tři kusy lepenky pomocí pásky k dokončení rámu. Opět se ujistěte, že mezi různými listy hliníkové fólie není žádný kontakt.
Krok 3: Zapojení štítových vodičů k desce a Arduinu



Pro připojení fólií k obvodu je důležité použít stíněný kabel. Použití běžných kabelů vytvoří efekt antény a bude rušit odečty vašich senzorů. Ujistěte se, že máte 3 stíněné kabely o délce asi 50 cm. Vezměte jeden kabel, odizolujte vodič, odstřihněte stínící vodiče a použijte pouze vnitřní vodič k jeho připojení pájením drátu na aligátorovou svorku. Nezapomeňte použít tepelný smršťovač, abyste zakryli pájené spojení. Klipy aligátora připněte na hliníkovou fólii.
Připojte všechny stínící vodiče k kladné řadě prkénka. Poté připojte tento kladný řádek k 5V připojení na vašem Arduinu. Nyní vezměte hlavní vodič ze stínícího kabelu a paralelně připojte odpor 10 k Ohm a 220 k Ohm. Připojte to k výstupnímu portu vašeho Arduina (použili jsme 8, 9 a 10).
Tento krok opakujte ještě 2krát pro ostatní letadla prototypu.
Krok 4: Zapojení LED diod




Konce LED diod připájejte na dlouhý drát tak, aby dosáhl na rohy příslušných desek z desky arduino.
Jako výstupní piny našich LED jsme použili piny 2, 3 a 4. Tento výstup je připojen k prkénku a připojen k kladné noze LED. Záporná část LED je potom připojena k odporu 330 Ohm. Druhý konec rezistoru je spojen se zemí prkénka, které je spojeno se zemí Arduina. Opakujte to pro všechny 3 LED diody. V našem prototypu je modrá LED připojena k rovině Y, červená LED k rovině Z a zelená LED k rovině X. Chcete -li získat přímou zpětnou vazbu při používání prototypu, přilepte LED diody k odpovídajícím rovinám.
Pokud nepoužíváte prkénko a chcete připojit stínící kabel přímo k Arduinu, na přiloženém obrázku je pěkný přehled pájených spojů. Vaše konečná připojení by měla vypadat jako úvodní obrázek.
Krok 5: Kódování
V příloze jsme umístili kód, který jsme použili pro tento experiment. Pro další informace je po každém hlavním příkazu umístěn komentář s vysvětlením, co se děje v kódu. Otevřete kód v softwaru Arduino v počítači a nahrajte jej do zařízení Arduino. Pokud používáte notebook, ujistěte se, že se nabíjí; jinak váš prototyp nebude fungovat.
Krok 6: Použití prototypu
Tento způsob sledování 3D pohybu je velmi citlivý na okolní proměnné. Ujistěte se proto, že hodnoty v kódu zkalibrujete podle své vlastní situace. K získání správných hodnot můžete jednoduše použít sériový monitor. Tip: Kalibraci můžete postavit sami, kde při spuštění kódu trvá průměrné hodnoty + 10 %. Na videu je ukázáno, jak by měl prototyp správně fungovat.
Doporučuje:
Snímání pohybu a tmy nočním světlem - žádné mikro: 7 kroků (s obrázky)
")
Night Light Motion & Darkness Sensing - No Micro: This instructable is about prevent you from strbing your toe when you walking through a dark room. Dalo by se říci, že je to pro vaši vlastní bezpečnost, pokud v noci vstanete a pokusíte se bezpečně dosáhnout ke dveřím. Samozřejmě můžete použít noční lampičku nebo hlavní li
Arduino, sledování otevírání dveří prostřednictvím Gmailu: 6 kroků

Arduino, sledování otevírání dveří prostřednictvím Gmailu: V tomto tutoriálu vám ukážu, jak detekovat událost otevírání dveří a odeslat oznámení přes Gmail pomocí Arduino Uno. Pokud jste začátečník, můžete se dozvědět o wifi a senzoru v Arduinu - návody na WiFi a Arduino - dveřní senzor. Pojďme
Snímání pohybu pod osvětlením postele: 16 kroků (s obrázky)
")
Snímání pohybu pod osvětlením postele: Pokoušeli jste se někdy v noci potichu vstát z postele, jen abyste o něco zakopli a probudili celý dům? Noční světla snímající pohyb instalovaná diskrétně pod postelí poskytují světlo nízké úrovně dostatečně jasné, aby vás vedlo kolem těch zbloudilých LEGO kostek
DIY automatické snímání pohybu LED noční světlo: 6 kroků (s obrázky)
")
Noční osvětlení LED s automatickým snímáním pohybu: Ahoj, pánové, vítejte v dalším instruktážním programu, který vám vždy pomůže ve vašem každodenním životě a přidá pohodlí, které vám usnadní život. Někdy to může být zachránce života v případě lidí vysokého věku, kteří se musí snažit vstát z postele
QeMotion - sledování pohybu pro každý headset!: 5 kroků (s obrázky)
")
QeMotion - sledování pohybu pro každou náhlavní soupravu !: Přehled: Toto zařízení vám umožňuje využít pohyb hlavy ke spuštění událostí v podstatě v jakékoli videohře. Funguje tak, že sleduje pohyb vaší hlavy (nebo náhlavní soupravy) a při určitých pohybech spouští stisknutí klávesnice. Takže váš počítač