
Obsah:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:23.
- Naposledy změněno 2025-01-23 14:38.

Dnes vám v tomto videu ukážu, jak ztlumit světla, ovládat rychlost motoru v DC nebo stejnosměrném proudu, takže pojďme začít.
Krok 1: Podívejte se na video

Přihlaste se k odběru mého kanálu a získejte další videa
Krok 2: Schéma zapojení pro nízkonapěťovou aplikaci

Toto schéma zapojení je pouze pro nízkonapěťové aplikace, jako je LED stmívač atd
Krok 3: Shromážděte všechny součásti



To jsou všechny součásti, které potřebujete
Časovač 555
Dioda 1N4148
1K odpor
10K POT
10nf kondenzátor
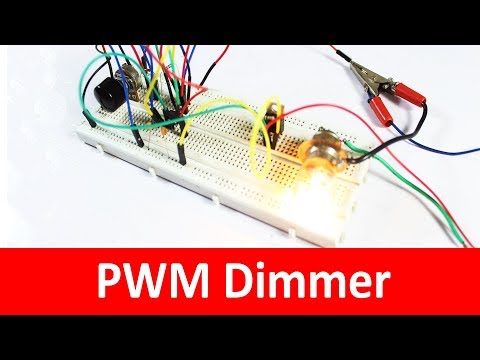
Krok 4: Toto je konečný výsledek

Může ovládat velmi malé množství zátěže. Pokud chcete používat těžké zátěže, jako je 25W žárovka na motorku, stejnosměrný motor, měli byste postupovat podle schématu zapojení níže.
Doporučuje:
DC MOTOR MOSFET Řízení rychlosti pomocí Arduina: 6 kroků

Rychlost řízení MOSFET DC MOTORU pomocí Arduina: V tomto tutoriálu se naučíme, jak ovládat rychlost DC motoru pomocí modulu MOSFET. Podívejte se na video
Obvod řízení rychlosti motoru Dc: 5 kroků

Obvod řízení rychlosti motoru Dc: V tomto krátkém článku se chystáme zjistit, jak vytvořit obvod se zpětnou vazbou rychlosti stejnosměrného motoru. Hlavně se chystáme zjistit, jak obvod funguje a co signál PWM? a způsob, jakým je signál PWM využíván k regulaci
Atmega128A Proporcionální řízení motoru - ATMEL ICE AVR Timer UART PWM Control: 4 kroky

Atmega128A Proportional Motor Driving - ATMEL ICE AVR Timer UART PWM Control: V tomto návodu vám vysvětlím, jak ovládat stejnosměrný motor pomocí komunikace PWM prostřednictvím přerušení časovače rukojeti UART Nejprve použijeme vývojovou desku systému AVR Core které na Aliexpressu najdete kolem 4 USD. Vývojová deska
SMĚR A RYCHLOST ŘÍZENÍ DC MOTORU S POUŽITÍM LABVIEW (PWM) A ARDUINO: 5 kroků
 A ARDUINO: 5 kroků")
SMĚR A RYCHLOST ŘÍZENÍ DC MOTORU S POUŽITÍM LABVIEW (PWM) A ARDUINO: Dobrý den, pánové, v první řadě se omlouvám za mou zábavnou angličtinu. V tomto návodu vám ukážu, jak ovládat rychlost stejnosměrného motoru pomocí labview
Řízení rychlosti stejnosměrného motoru pomocí algoritmu PID (STM32F4): 8 kroků (s obrázky)
: 8 kroků (s obrázky)")
Řízení rychlosti stejnosměrného motoru pomocí algoritmu PID (STM32F4): ahoj všichni, toto je tahir ul haq s jiným projektem. Tentokrát je to STM32F407 jako MC. Toto je konec projektu v polovině semestru. Doufám, že se vám to líbí. Vyžaduje to hodně konceptů a teorie, takže se do toho pustíme jako první. S příchodem počítačů a