")
Obsah:
- Krok 1: Jak to funguje?
- Krok 2: Pamatujte si, než začnete
- Krok 3: Shromážděte veškerý materiál
- Krok 4: Variuosovy rozměry
- Krok 5: Tvorba těla
- Krok 6: Sestava pohonu a výroba desek
- Krok 7: Manupalizace vlnových charakteristik
- Krok 8: Elektronická připojení a program
- Krok 9: Ovládání akčních členů pomocí programu řízeného pomocí nabídky
- Krok 10: Jak ovládat vlnový tank
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:22.
- Naposledy změněno 2025-01-23 14:38.



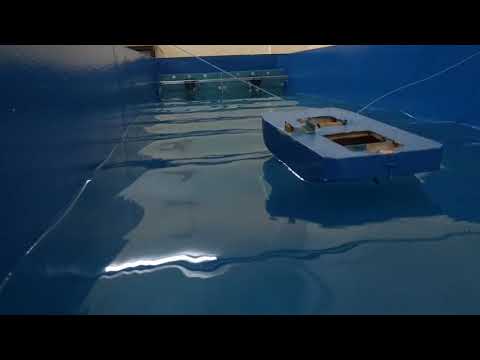
Vlnová nádrž je laboratorní zařízení pro pozorování chování povrchových vln. Typickou vlnovou nádrží je krabice naplněná kapalinou, obvykle vodou, přičemž nahoře zůstává otevřený nebo vzduchem naplněný prostor. Na jednom konci nádrže generuje pohon vlny; druhý konec má obvykle povrch pohlcující vlny.
Obvykle tyto tanky stojí hodně peněz, takže jsem se pokusil vytvořit opravdu levné řešení pro studenty, kteří chtějí tank použít k testování svých projektů.
Krok 1: Jak to funguje?
Projekt se tedy skládá ze dvou pohonů vyrobených pomocí hliníkových výlisků s drážkou v.
Ke každému akčnímu členu je připojen krokový motor a oba motory jsou řízeny stejným pohonem krokového motoru, takže nedochází k žádnému zpoždění.
Arduino slouží k ovládání ovladače motoru. K zadání vstupu do zařízení připojeného přes počítač se používá program řízený z nabídky. Desky akčních členů jsou namontovány na portálech ve tvaru V, které se budou pohybovat tam a zpět, jakmile se motory spustí, a tento pohyb desek tam a zpět generuje vlny uvnitř nádrže. Výšku vlny a délku vlny lze změnit změnou rychlosti motor přes arduino.
Krok 2: Pamatujte si, než začnete

Nepokryl jsem většinu malých věcí, jak používat arduino nebo jak provádět svařování, aby byl tento návod malý a snadno pochopitelný. Většina chybějících věcí bude odstraněna na obrázcích a videích. V případě problému nebo dotazů týkajících se projektu mi prosím napište zprávu.
Krok 3: Shromážděte veškerý materiál
- Mikrokontrolér Arduino
- 2*krokový motor (2,8 kgcm točivý moment na motor)
- 1*Ovladač krokového motoru
- Portálový systém 2*V slot
- Ocelové nebo železné desky pro tělo nádrže
- L výztuhy na podporu těla
- Vlákno nebo plastový plech pro výrobu ovládací desky
- Vodiče 48voltové stejnosměrné napájení
Nezahrnul jsem materiály pro portály v-slotů, protože seznam bude velmi velký, pak stačí v-slot google vygenerovat mnoho videí o tom, jak jej sestavit. Použil jsem vytlačování hliníku 2040. Kapacita motoru a kapacita napájecího zdroje se změní, pokud chcete nést větší zátěž.
Rozměry nádrže
Délka 5,50 m
Šířka 1,07 m
Hloubka 0,50 m
Krok 4: Variuosovy rozměry



Aby to bylo jednodušší a výukový program kratší, pořídil jsem obrázky různých komponent s měřítkem, abyste viděli jejich velikosti.
Krok 5: Tvorba těla




Tělo je vyrobeno z litinového plechu o tloušťce 3 mm.
Šířka nádrže je 1,10 metru, délka 5 metrů a výška 0,5 metru.
Tělo nádrže je vyrobeno z měkké oceli a všude tam, kde je to nutné, jsou vyztuženy. Pláty z měkké oceli byly ohnuty a rozřezány na různé části podle rozměrů nádrže. Tyto sekce byly poté vztyčeny jejich svařením. Aby byla konstrukce pevnější, byly také svařeny výztuhy.
První deska byla ohnuta do požadované velikosti v různých částech a poté byly tyto části svařeny dohromady, aby se vztyčilo tělo. Byly přidány výztuhy, protože rozměry výztuh podpěr jsou uvedeny na obrázku
Krok 6: Sestava pohonu a výroba desek



pohony jsou vyráběny pomocí systémů v-slotů. Jsou opravdu levné a snadno se staví, můžete si je online vygooglovat, jak jeden z nich sestavit. Pro zvýšení únosnosti jsem použil místo řemenového převodu vodicí šroub. Nezahrnul jsem návod k montáži, protože se bude měnit podle zatížení, které chcete nést. Pro mě bylo zatížení při maximální rychlosti kolem 14 Kg.
Ovládací deska je vyrobena z frp plechu, lze použít i akrylát. Rám z nerezové oceli byl postaven na podporu listu frp.
Rám pádla
Rám pádla je vyroben z nerezové oceli. Nerezová ocel je vodotěsná a odolává korozi. Pro rám pádla byl použit čtvercový průřez 2 x 2 cm. Byl nezbytný robustní rám, protože na generátor vln bude působit velké množství cyklického zatížení. Ocelový rám se nebude ohýbat, a proto bude generovat pravidelnou sinusovou vlnu.
Byla vyrobena vlastní svorka L pro spojení desky pohonu s portálovou deskou v systému vslot.
Krok 7: Manupalizace vlnových charakteristik



Tank může generovat různou výšku vlny podle požadavku. Pro generování různé výšky vlny jsou upraveny otáčky motoru. Aby se dosáhlo velké výšky vlny, zvýšily se otáčky motoru a současně se snížila vlnová délka vlny. Obdobně ke zvýšení vlnové délky se sníží otáčky motoru. Otáčky lze upravit výběrem vlastní možnosti otáček z nabídky.
Maximální otáčky = 250
Minimální otáčky = 50
Níže je uveden příklad různé výšky vlny zaznamenané akcelerometrem. První obrázek jsou data zaznamenaná při vysokých otáčkách, v důsledku čehož získáme vysokou výšku vlny. Druhý obrázek ukazuje sníženou výšku vlny a zvýšenou vlnovou délku grafu, což jsou data zaznamenaná akceleromerem a představují skutečné vlnové charakteristiky generované vlny.
Krok 8: Elektronická připojení a program

Při připojování napájecího zdroje dávejte pozor na polaritu připojení, připojte kladný pól na kladný a záporný na záporný. Proveďte připojení motoru a ovladače, jak je znázorněno na obrázku. Jakmile jsou všechna připojení správná, připojte kolíky mikrokontroléru (8, 9, 10 a 11)) do ovladače krokového motoru. Připojte mikrokontrolér k počítači pomocí USB. Spusťte Arduino IDE> Sériový monitor.
Program je zahrnut v tutoriálu a je samovysvětlující, že k ovládání používá příkazy case a if else. Je to opravdu jednoduché, student střední školy to také může pochopit.
Zde je odkaz na program Google Drive
Ovládací program Arduino
Krok 9: Ovládání akčních členů pomocí programu řízeného pomocí nabídky

Jakmile je mikrokontrolér správně připojen k počítači, budete podobnou nabídkou. Chcete -li vybrat možnost, zadejte číslo vedle možnosti a stiskněte klávesu Enter
Příklad:-
Chcete -li vybrat „Aktivovat při maximální frekvenci“, zadejte 1 a stiskněte Enter.
Chcete -li akci zastavit, zadejte 0 a stiskněte Enter.
Nouzové zastavení
Chcete -li pohon zastavit, stiskněte nulu „0“a zadejte.
Chcete -li provést nouzové zastavení, stiskněte reset na mikrokontroléru nebo přerušte napájení.
Krok 10: Jak ovládat vlnový tank

Tento tank byl vyroben jako součást mého velkého projektu. Tank byl testován na generování různých pravidelných vln v podmínkách moře na moři pro zmenšený model člunu. Testování vlnového žlabu bylo úspěšné. Celkové náklady na vývoj tohoto projektu byly Rs. 81 000 (pouze Eighty One Thousand) po dobu dvou měsíců.
V případě jakýchkoli dotazů prosím napište komentář.

První cena ve vodní soutěži
Doporučuje:
Hacking the Hexbug Spider XL to add Computer Vision using an Android Smartphone: 9 Steps (with Pictures)
")
Hacking the Hexbug Spider XL to add Computer Vision using an Android Smartphone: I am big fan the original Hexbug ™ Pavouk. Vlastnil jsem přes tucet a všechny jsem hackl. Kdykoli jeden z mých synů jde k přátelům ’ narozeninová oslava, přítel dostane Hexbug ™ pavouk jako dárek. Hackl jsem nebo
IoT Notifier using ESP-12E: 7 Steps (with Pictures)
")
IoT Notifier using ESP-12E: Stuck home away from your milovaný? Během této obtížné doby se tento zábavný malý projekt určitě pokusí vykouzlit úsměv na tváři. V tomto Instructable vám ukážu, jak zobrazit oznámení z vašeho mobilního telefonu ve formě
Roll and Pitch Axis Gimbal for GoPro using Arduino - Servo and MPU6050 Gyro: 4 Steps

Roll and Pitch Axis Gimbal for GoPro using Arduino - Servo and MPU6050 Gyro: This instructable was created in meet the project požadavek of the Makecourse at the University of South Florida (www.makecourse.com) Cílem tohoto projektu bylo vybudovat 3osý kardan pro GoPro pomocí Arduino nano + 3 servomotory +
Propagator Thermostat using ESP8266/NodeMCU and Blynk: 7 Steps (with Pictures)
")
Propagátorový termostat pomocí ESP8266/NodeMCU a Blynk: Nedávno jsem si koupil vyhřívaný propagátor, který by měl pomoci klíčení semen květin a zeleniny dříve v sezóně. Přišlo to bez termostatu. A protože jsou termostaty dost drahé, rozhodl jsem se vyrobit si vlastní. Jak jsem chtěl použít
Talk to Pick and Artificial Intelligence Chat using Cleverbot: 14 Steps (with Pictures)
")
Talk to Pick and Artificial Intelligence Chat using Cleverbot: Zde zkouším nejen hlasové povely, ale také chat s umělou inteligencí s počítačem pomocí Cleverbot. Ve skutečnosti ten nápad přišel, když se zjistilo, že děti míchají barvy v omalovánkách, když berou barvu z jedné barvy na nejbližší. Ale nakonec realizovat